
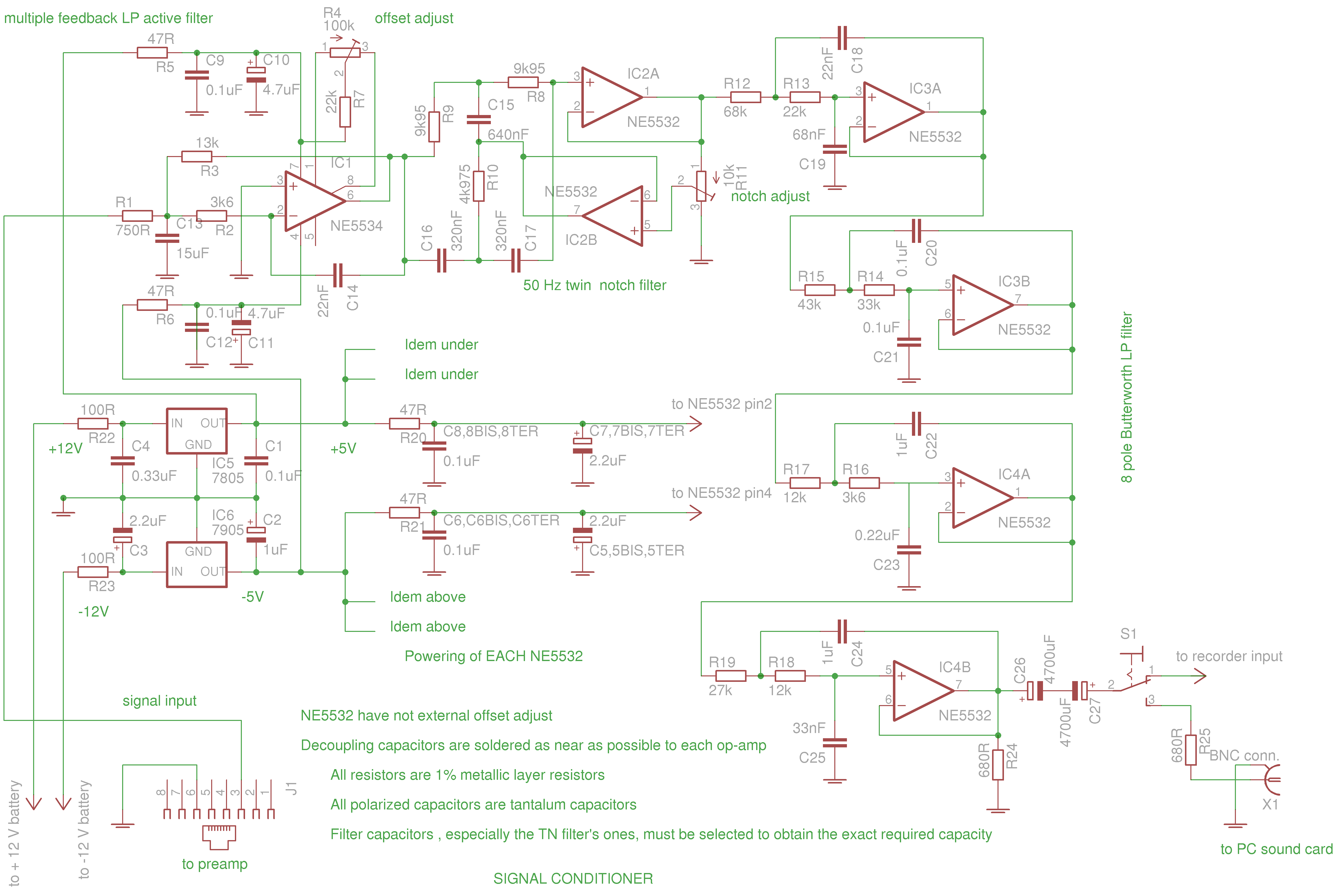
1°/ A multiple feedback active low-pass filter with a gain of about 18, a 40 Hz cutoff frequency and a quality factor of 2.2. This stage uses a NE5534 low-noise OP-AMP (less expensive than the AD797 used in the preamplifier).
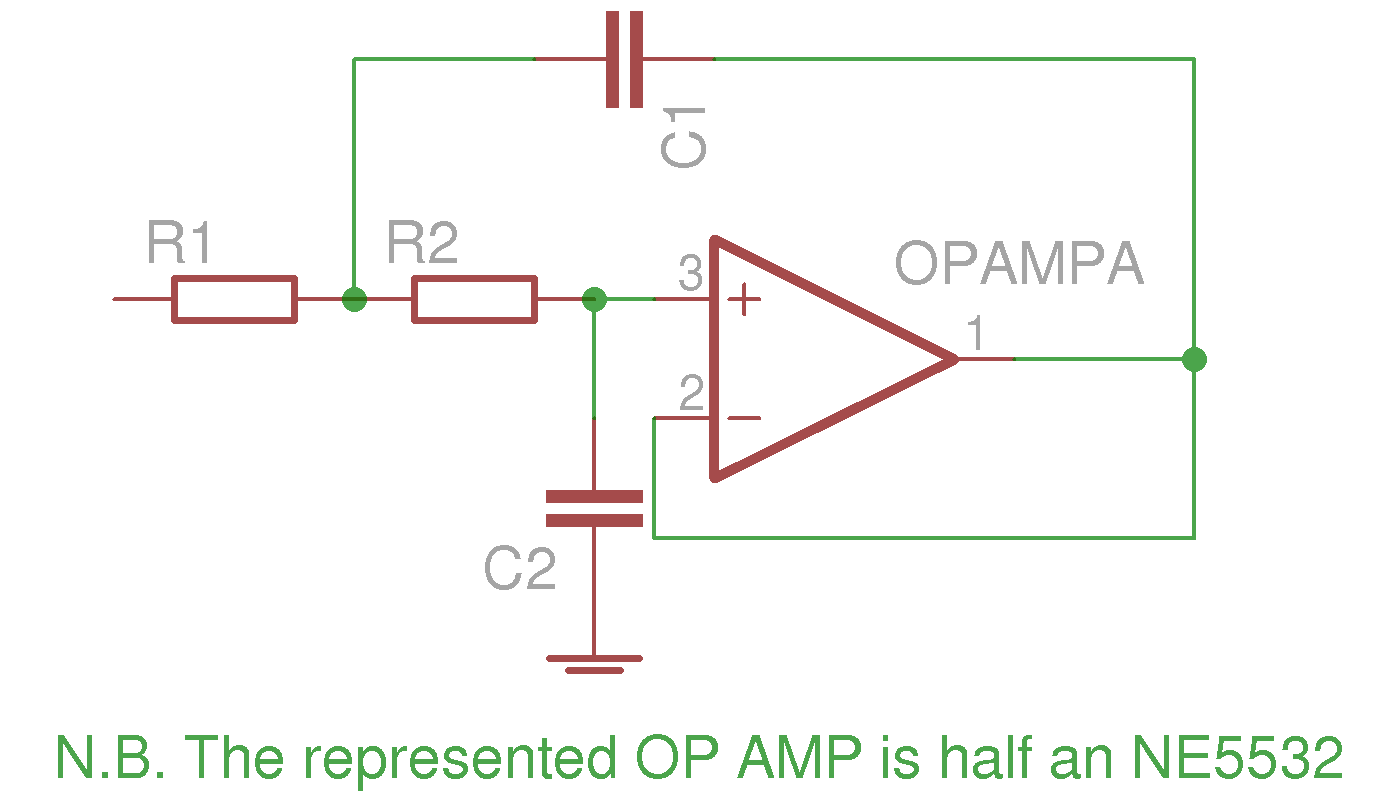
2°/ A 50 Hz active twin T notch filter using a cheap (but still good) double OP-AMP NE5532
3°/ A 8 pole Butterworth Sallen-Key active 50 Hz low-pass filter using two NE5532s.
N.B. These specifications were determined after multiple trials at the same time making trial graphic transfer function simulations and some concrete implementations. The difficulty was to obtain a relatively horizontal response curve between 0.1 and 40 Hz and a drastic drop after 40 Hz. I have finally chosen not to totally crush the 50 Hz to obtain a frequency reference line on the spectrograms and to be able to control the recorder sampling rate. It's evident that it's possible to make different choices and obtain better or different results. The calculation details of components values is provided in order to build a system with other bandwidths, such as 0.1-5 Hz or 0.1-120 Hz. For this purpose, the recorder sample rate was fixed at a relatively high value to be able to change filter characteristics without changing the MCU programmation (see part 3). Regarding that, remember that the preamplifier contains a primary filter with a 87 Hz cutoff frequency and it might be necessary to change the C9 value (see part 1).
The outpout signal may be sent to a PC sound card used as A/D converter to allow real time FFT analysis, a very useful option for the developement, or to the recorder, which is the normal system using mode.
Click here for a full resolution scheme
For the filters calculation (and using OP-AMP) I have mainly used Chapter 8 of the Analog Device study named Analog Device Basic Linear Design (ADBLD), which is freely downloadable on the AD site and the Texas Instruments study named Active Filter Design Techniques. A dual 5 V power supply is used, but 3.3 V would suffice. The 2350 uF coupling capacitor C26+C27 is indispensable when the system is used with the recorder. The sound card impedance adaptation R25 does not have any absolutely critical value but its presence is necessary.
There now follows the calculation details using Maple 14 (but any calculator will do).
The multiple feedback low pass filter design.
For capacitors and resistors I am keeping the names of the above schematics. The other notations are :
 i.e. , if we set the trimmer so
that
i.e. , if we set the trimmer so
that 
{kind=link}